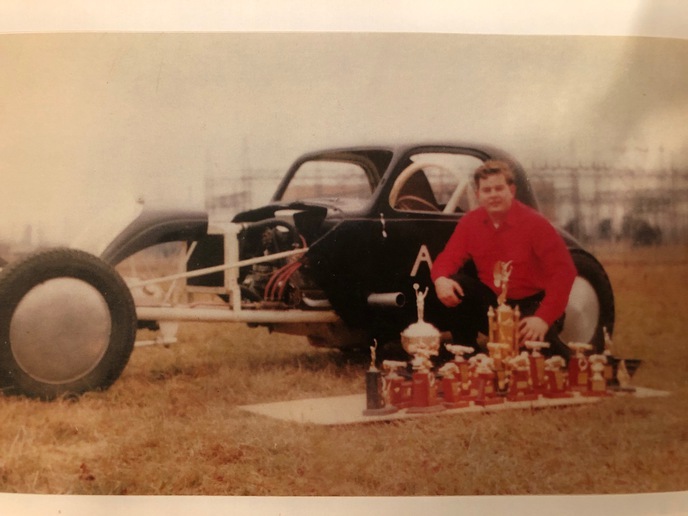
This is a 2009 Toyota Prius power steering unit and module I adapted onto my 8N. The pictures show the Ford column tube cut off at the box and the inside of where the tube was machined out to fit a CR 8060 seal at this new location. After the Ford column shaft was cut off, leaving about an inch exposed, I welded up an adapter made from a piece of tube, to fit over the old shaft, welded to the end of a cut Toyota U joint connector from the Prius lower column extension.
Part of the 8N body support work had to be cut away to clear the power unit and I also had to heat up and pound out (rather than just cutting away) some of the instrument sheet metal to also clear the unit. The throttle linkage also had to be relocated about an extra inch to the right to clear. I welded up an adapter to bolt the power unit (using the Koyo mounting surface bolt holes) to the 8N body support that is normally bolted to the 8N steering box.
The final "challenge", as it were, was to figure out a way to attach an antique American steering wheel onto a Japanese column. The middle section of the Koyo column, where I had to shorten it to, has a serrated shaft of similar diameter to the Ford shaft albeit a much more coarse serration compared to the old Ford shaft. The wheel would not slide over the new column. I had to cut a section off the Koyo shaft to shorten the overall column so it would be the same height as the old one. I started thinking about the piece I removed and sharpened one end then used it as a broach tool by sticking it in the hydraulic press and forcing it through the steering wheel hub. It cut a new pattern into the old wheel. All I then had to do was tap the center hole in the column shaft to 7/16" threads to bolt the wheel on. Worked like a charm.







Part of the 8N body support work had to be cut away to clear the power unit and I also had to heat up and pound out (rather than just cutting away) some of the instrument sheet metal to also clear the unit. The throttle linkage also had to be relocated about an extra inch to the right to clear. I welded up an adapter to bolt the power unit (using the Koyo mounting surface bolt holes) to the 8N body support that is normally bolted to the 8N steering box.
The final "challenge", as it were, was to figure out a way to attach an antique American steering wheel onto a Japanese column. The middle section of the Koyo column, where I had to shorten it to, has a serrated shaft of similar diameter to the Ford shaft albeit a much more coarse serration compared to the old Ford shaft. The wheel would not slide over the new column. I had to cut a section off the Koyo shaft to shorten the overall column so it would be the same height as the old one. I started thinking about the piece I removed and sharpened one end then used it as a broach tool by sticking it in the hydraulic press and forcing it through the steering wheel hub. It cut a new pattern into the old wheel. All I then had to do was tap the center hole in the column shaft to 7/16" threads to bolt the wheel on. Worked like a charm.
")